
Y7000P 双系统安装ubuntu18.04和ubuntu20.04均出现错误,ubuntu16.04成功.
固态硬盘已经确认gpt模式并且全盘格式话,多次测试重装依然出现同样问题,可能是镜像的ext4 file creation功能和BIOS或者硬盘冲突,暂时无法解决,只能通过系统升级绕过该问题。
linux是文件系统,并且官方也推荐dist-upgrade,升级和直接装应该差别不打。
方法一:官方推荐的Softwre &Updates
https://ubuntu.com/tutorials/upgrading-ubuntu-desktop#3-check-for-updates
方法二:命令行
Ubuntu16.04升级到18.04
Ubuntu18.04升级到20.04
系统升级完成后要 kernel升级
1 :获取最新的内核的:sudo apt list | grep linux-generic*
2:直接安装:sudo apt-get install linux-generic-hwe20.04-edge
3:Reboot重启4:check安装是否成功:sudo uname -r
1.5 安装显卡驱动
查看显卡设备和显卡驱动
会给你显示recommended的显卡驱动
自动安装合适的显卡驱动
这个时候先不要着急重启,在应用里打开 软件与更新,检查一下有没有需要更新的软件,更新一下。
更新以后重启。
重启之后,在设置->详细信息里可以看到此时的显卡已经切换为Nvidia。
2.1 install_base_tools.sh
2.2 应用商店直接搜索的软件:gitkraken,vscode
2.3 Ubuntu搜狗输入法安装指南
安装完成重启Ubuntu。
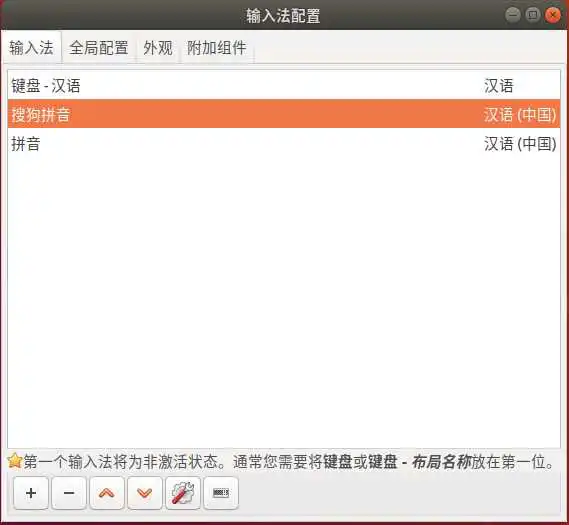
重启后,点击右上角小键盘-设置,调整一下输入法顺序。熟悉的输入感觉就来了。
更改设置,点击输入操作条上的扳手按钮,可以设置皮肤,设置熟悉的习惯,还可以登录个人中心,同步个人词库。
2.4 Ubuntu install of ROS Noetic
https://www.cnblogs.com/chenjian688/p/13796546.html
官网的源太慢的话切换源
2.3 IDE
1)kdevelop
应用商店直接搜索行装
添加到桌面
添加内容:
ps: 在设置桌面快捷方式如终端改为zsh,需以下操作,不然难以find ros下的cmake/catkin_make
2.4 v*皮×N
https://speedsss.com/user
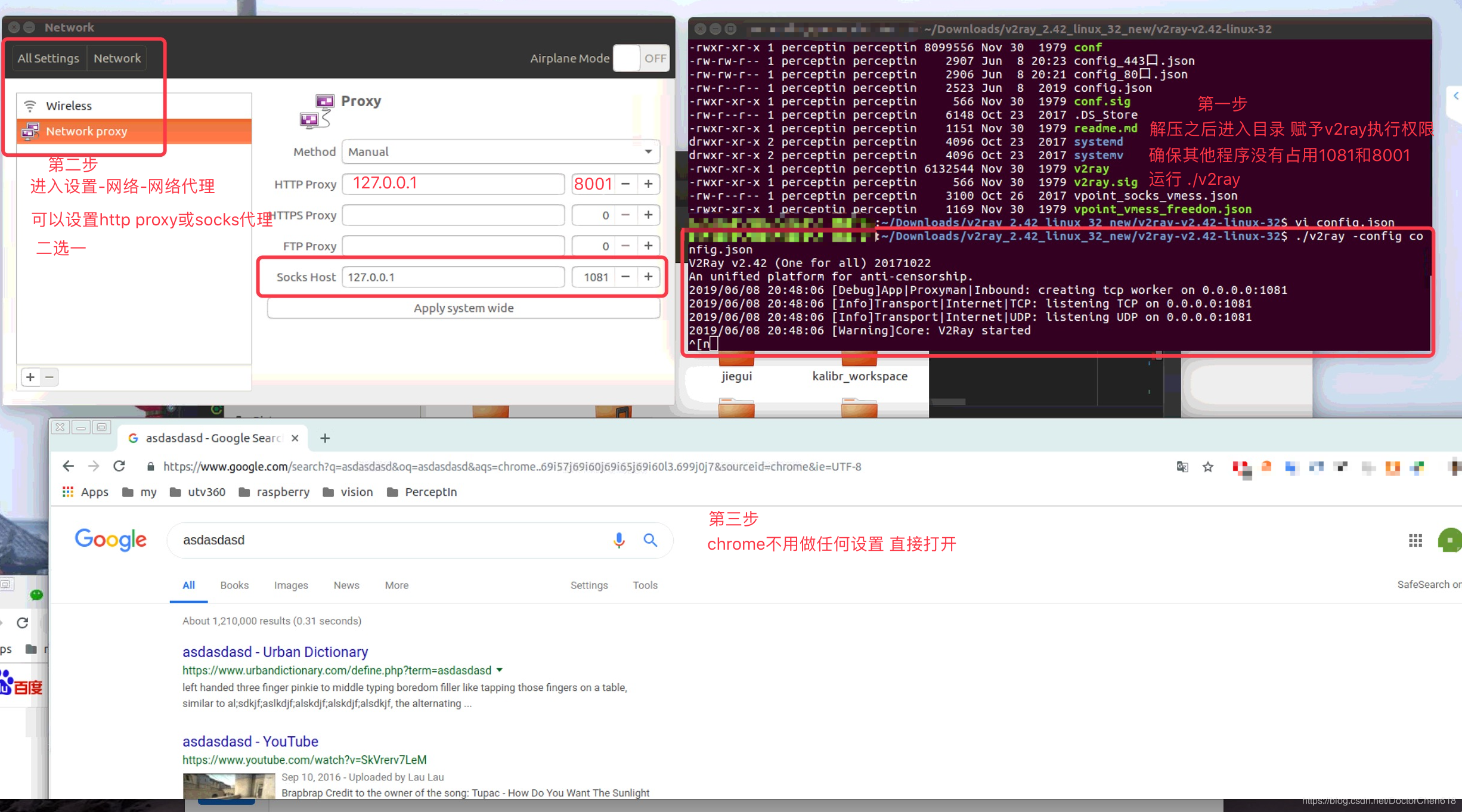
如果上述设置没有对terminal的env起作用,需要命令行再次设置,也可以直接写到.zshrc中
2.5 Ubuntu18.04 gedit 中文乱码
2.7 cloudcompare
1)安装
方式1:源码编译安装,建议
http://www.cloudcompare.org/
https://github.com/CloudCompare/CloudCompare
https://blog.csdn.net/fangjin_kl/article/details/
不能打开.pcd的解决方案:在 ccmake .. 后开启 选项
方式2:官网Ubuntu 的安装方法
2)cloudcompare 不能打开pcd文件,解决方案:
cmake 后,在build/CMakeCache.txt文件中,开启 选项,然后make install 编译安装。
具体如下,打开build/CMakeCache.txt文件,317行"OFF"改为"ON"
修改为
需要选取其他plugin,也可以对应开启
2.8 ubuntu16.04下安装新版
2.9 Ubuntu20.04与Windows时间不一致
2.10 安装Ubuntu 16.04后要做的事
zsh
Ubuntu 20.04 安装zsh/Oh My Zsh
Ubuntu 18.04 安装配置Oh My Zsh 主题设置
wps
下载wpsforlinux deb
WPS for Linux(ubuntu)字体缺失解决办法(转)
2.11 matlab
Linux下安装Matlab R2017a超详细安装教程(带图文)
选择激活的license文件(install_path/licensesicense_standalone.lic)
2.12 usb抓包
2.13 mount
ubuntu挂载及开机自动挂载网络端的文件夹的方法
2.21其他
gcc安装
命令:sudo apt-get install build-essential
http://www.cnblogs.com/zero1665/archive/2009/11/03/1595510.html
Adobe flash player
sudo apt-get install flashplugin-installer
qt
sudo apt-get install qt4-dev-tools #开发包 sudo apt-get install qtcreator #IDE sudo apt-get install qt4-doc #开发帮助文档 (可以省略) sudo apt-get install qt4-qtconfig #配置工具 sudo apt-get install qt4-demos #DEMO源码 QT (可以省略)
meshlab
装qt。在主页找到linux下meshlab的安装包,然后再按安装压缩包中的readme文件去做。可执行文件meshlab在目录meshlab/src/distrib下
subversion(svn)
$ sudo apt-get install subversion $ sudo apt-get install libapache2-svn
teamviewer Ubuntu 16.04 安装teamviewer
sudo apt install f
sudo apt install teamviewer_13.0.9865_amd64.deb
3.1 camera LUMIX 硬盘连接
sudo apt-get install exfat-fuse exfat-utils
参考:
1. https://jingyan.baidu.com/article/3c48dd348bc005e10be358eb.html
2. https://blog.csdn.net/zhangxiangweide/article/details/
3. https://blog.csdn.net/IT_Java8/article/details/
3.2 usb带宽使用情况
3.3 录屏
3.4 Linux下多窗口分屏式终端--Terminator
常用快捷键
Ctrl+Shift+E 垂直分割窗口
Ctrl+Shift+O 水平分割窗口
F11 全屏
Ctrl+Shift+C 复制
Ctrl+Shift+V 粘贴
Ctrl+Shift+N 或者 Ctrl+Tab 在分割的各窗口之间切换
Ctrl+Shift+X 将分割的某一个窗口放大至全屏使用
Ctrl+Shift+Z 从放大至全屏的某一窗口回到多窗格界面
3.4 Ubuntu 18.04实现实时显示网速
1) 创建工作空间
ROS系列-官方catkin创建工程
2) 把对应源码copy 或者未git clone到src文件中
3) cmake 或 kDE 编译
或 catkin_make
https://www.cnblogs.com/qixianyu/p/6605830.html
1. launch 文件中 使用 launch-prefix="xterm -e gdb --args"
[1] gdb调试ros node
[2] GDB基本命令(整合)
[3]GDB十分钟教程
sudo apt-get install ros-noetic-geodesy ros-noetic-nmea-msgs
1) g2o
源代码文件组织不规范,一定安装在默认路径下才能便于工程的cmakelist.txt查找库.
master 一直在维护更新,要注意使用旧版本.
2) DBoW3
DBoW3 only requires OpenCV.
如果遇到如下错误:
/usr/bin/ld: /home/chenshoubin/tools/DBow3/install/lib/libDBoW3.a(Database.cpp.o): relocation R_X86_64_PC32 against symbol `_ZTVN5DBoW38DatabaseE' can not be used when making a shared object; recompile with -fPIC
/usr/bin/ld: final link failed: Bad value
collect2: error: ld returned 1 exit status
修改为:
重新编译DBoW3
3) Sophus
https://github.com/strasdat/Sophus.git
早期为非模板的Sophus库,只提供双精度的李群李代数类. 后续版本写成了模板类,如最新的master.注意区分.
基于Eigen开发,不需要额外依赖库.
ubuntu18.04编译Sophus库问题及解决方法
在终端中执行make后,出现以下错误: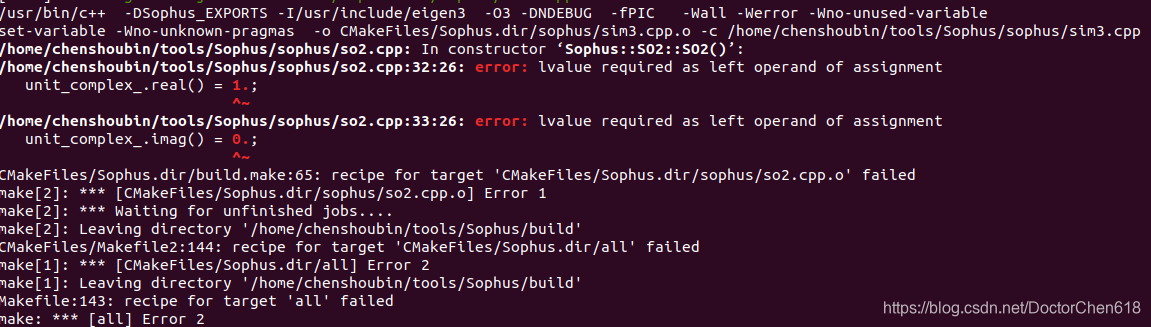
即出现错误:
/home/xq/Sophus/sophus/so2.cpp:32:26: error: lvalue required as left operand of assignment
unit_complex_.real() = 1.;
/home/xq/Sophus/sophus/so2.cpp:33:26: error: lvalue required as left operand of assignment
unit_complex_.imag() = 0.;
解决方法如下:
将so2.cpp源码文件下的代码:
SO2::SO2()
{
unit_complex_.real() = 1.;
unit_complex_.imag() = 0.;
}
修改为:
SO2::SO2()
{
//unit_complex_.real() = 1.;
//unit_complex_.imag() = 0.;
unit_complex_.real(1.);
unit_complex_.imag(0.);
}
重新编译Sophus4
4)PCL
ros安装时自带PCL,neotic 对应v1.10,可能出现错误:
/usr/include/pcl-1.10/pcl/pcl_config.h:7:4: error: #error PCL requires C++14 or above
![]()
在工作空间下的CMakeLists.txt文件中添加以下指令即可:![]()
操作后继而造成boost函数错误,gicp_omp.h中添加boost头文件: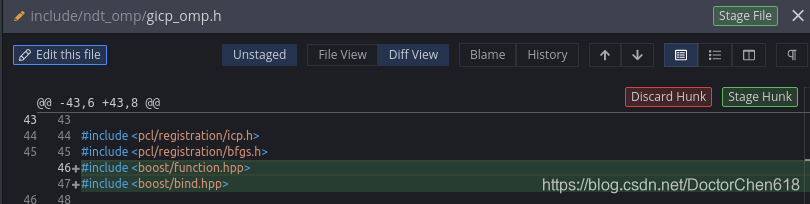
http://www.ceres-solver.org/installation.html#linux 下载 ceres-solver-1.14.0.tar.gz并解压
install all the dependencies.
install Ceres.
https://docs.opencv.org/trunk/d7/d9f/tutorial_linux_install.html
根据需要选取版本
linux下多版本opencv共存问题
1) 下载并安装 libpcap-dev.用于抓包,RS-LiDAR-16 ROS Package的依赖库
问题:error while loading shared libraries: libpcap.so.1: cannot open shared object file: No such file or directory
2) 编译 RS-LiDAR-16 ROS Package
3) 注意:因为rslidar里面含有5个子工程包(如下图),使用cmake逐个编译太麻烦,因此使用了catkin_make一起编译.
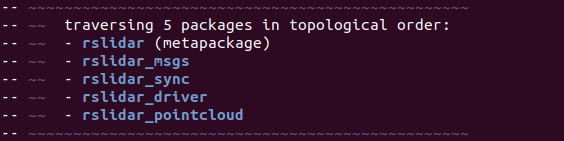
问题是catkin_make可能会编译src下的其他packages.
解决方法1,暂时把其他packages转移出src,编译安装完再移回去.
解决方法2,指定编译白名单
4)配置网络IP,启动ros节点
1)下载libdepthengine.so.2.0文件
到网站中下载libk4a1.4里的deb文件 https://packages.microsoft.com/ubuntu/18.04/prod/pool/main/libk/
解压缩deb文件,获得libdepthengine.so.2.0,然后把libdepthengine.so.2.0复制到/usr/lib/x86_64-linux-gnu/文件夹中
2) Azure-Kinect-Sensor-SDK
命令行安装或者源码安装,推荐源码安装.
https://docs.microsoft.com/zh-cn/azure/kinect-dk/sensor-sdk-download
https://blog.csdn.net/star0w/article/details/
遇到git clone失败的情况,可以设置git代理
3) 进入Azure Kinect sdk 源码根目录中 scripts 文件夹,复制99-k4a.rules文件至/etc/udev/rules.d/
4)Azure_Kinect_ROS_Driver
5) 启动ros node
driver.launch 中的<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />有error,改为
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
6)更新 Azure Kinect DK 固件
新固件下载地址
https://github.com/microsoft/Azure-Kinect-Sensor-SDK/blob/develop/docs/usage.md
1)驱动包和键盘控制包
官网http://www.autolabor.com.cn/download 下载驱动包和键盘控制包

http://www.autolabor.com.cn/lib/detail/12 视频介绍在 ROS 中使用 Autolabor ROS 键盘控制包,控制Autolabor Pro1行走。
2)ROS配置和使用Xbox One无线手柄
3)joy_to_twist 编译安装
可以根据按键操作习惯修改src源码
4)上位机手柄驱动Autolaber
Autolaber USB连接上位机,上位机蓝牙连接手柄,执行以下命令
https://google-cartographer-ros.readthedocs.io/en/latest/compilation.html#building-installation
1)ERROR 1
2)ERROR 2
如遇到python版本问题请切换
https://blog.csdn.net/l/article/details/
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
到此这篇ubuntu镜像iso下载(ubuntu2004镜像iso下载)的文章就介绍到这了,更多相关内容请继续浏览下面的相关推荐文章,希望大家都能在编程的领域有一番成就!版权声明:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若内容造成侵权、违法违规、事实不符,请将相关资料发送至xkadmin@xkablog.com进行投诉反馈,一经查实,立即处理!
转载请注明出处,原文链接:https://www.xkablog.com/bcyy/33062.html