



模拟量闭环控制系统-PID控制的特点:
不需要被控对象的数学模型,结构简单容易实现,使用方便有较强的灵活性和适应性。


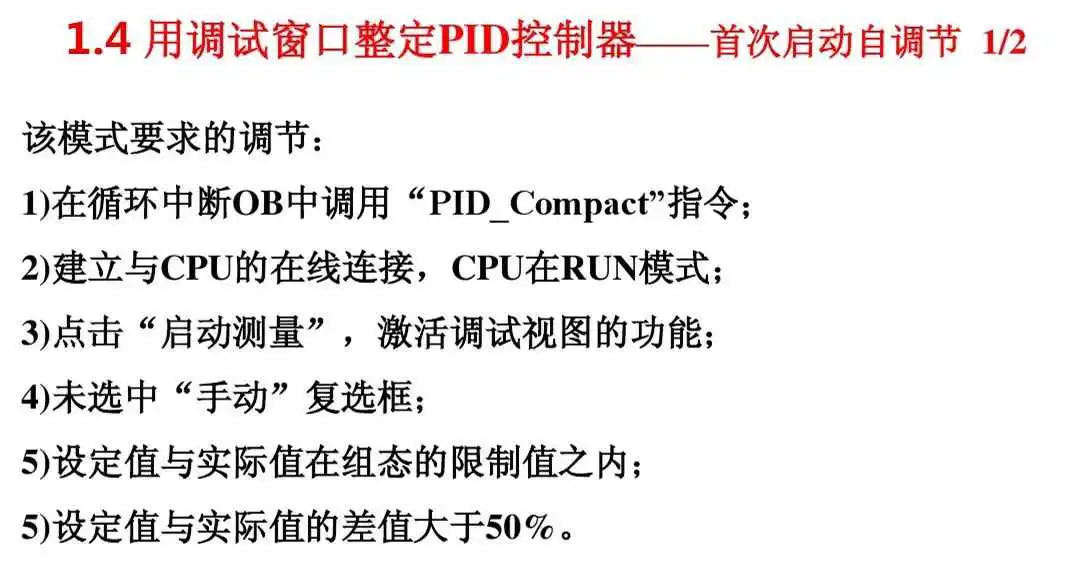
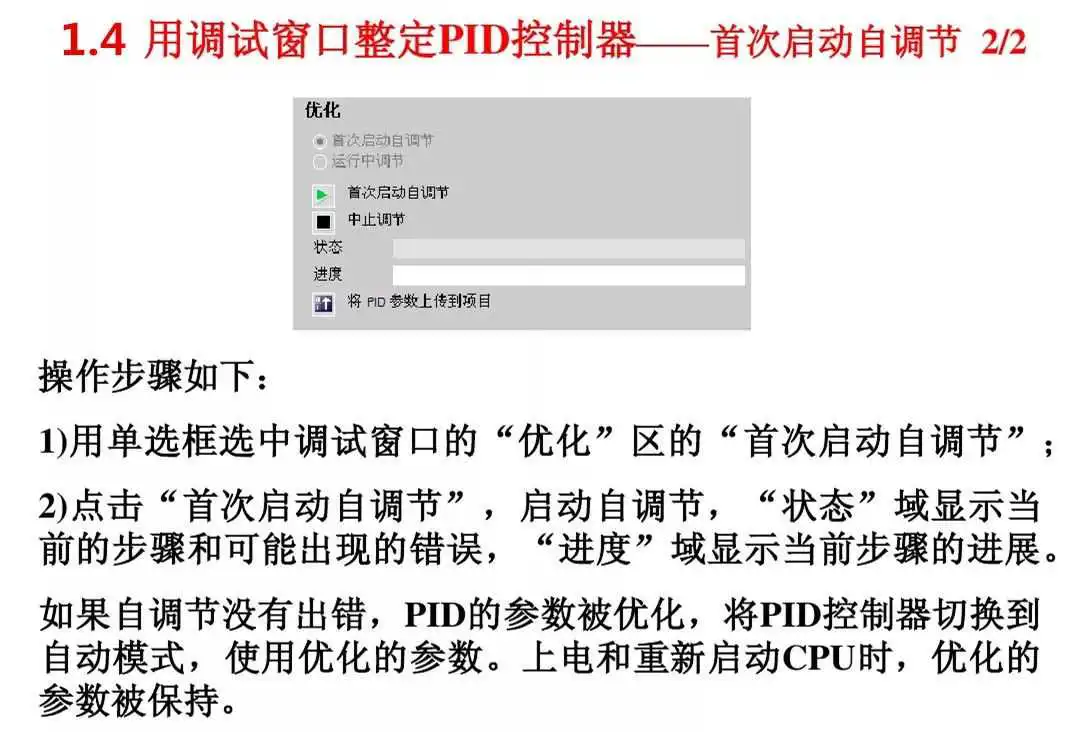
1、使用“首次启动自调节”功能优化控制器
2、使用“运行中自调节”功能优化控制器,可以实现最佳调节
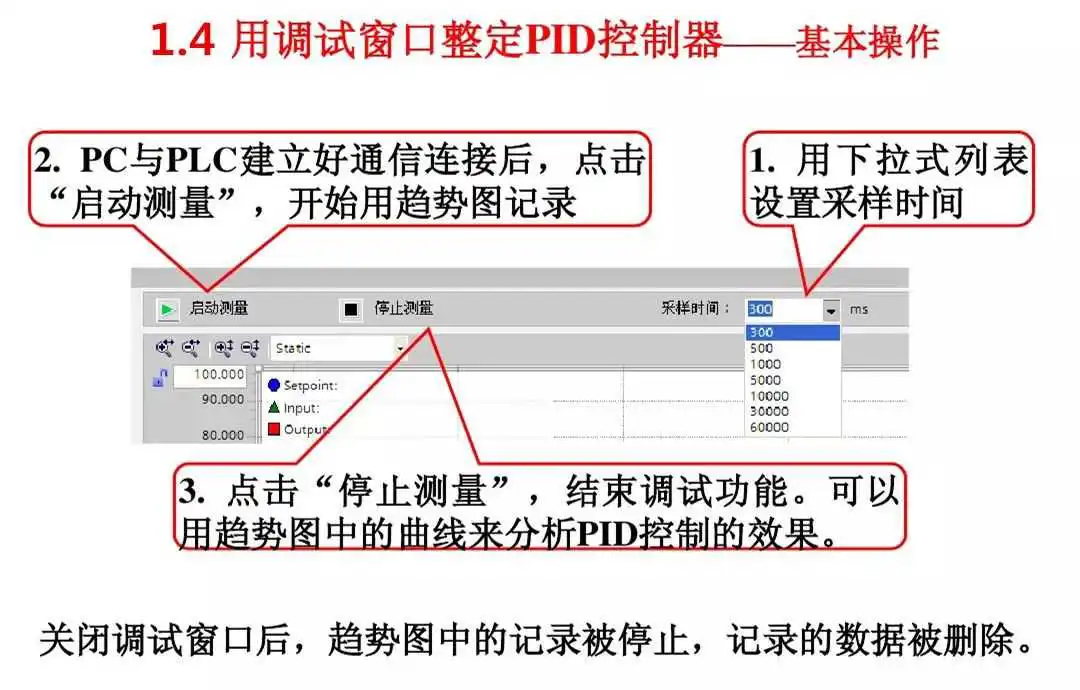
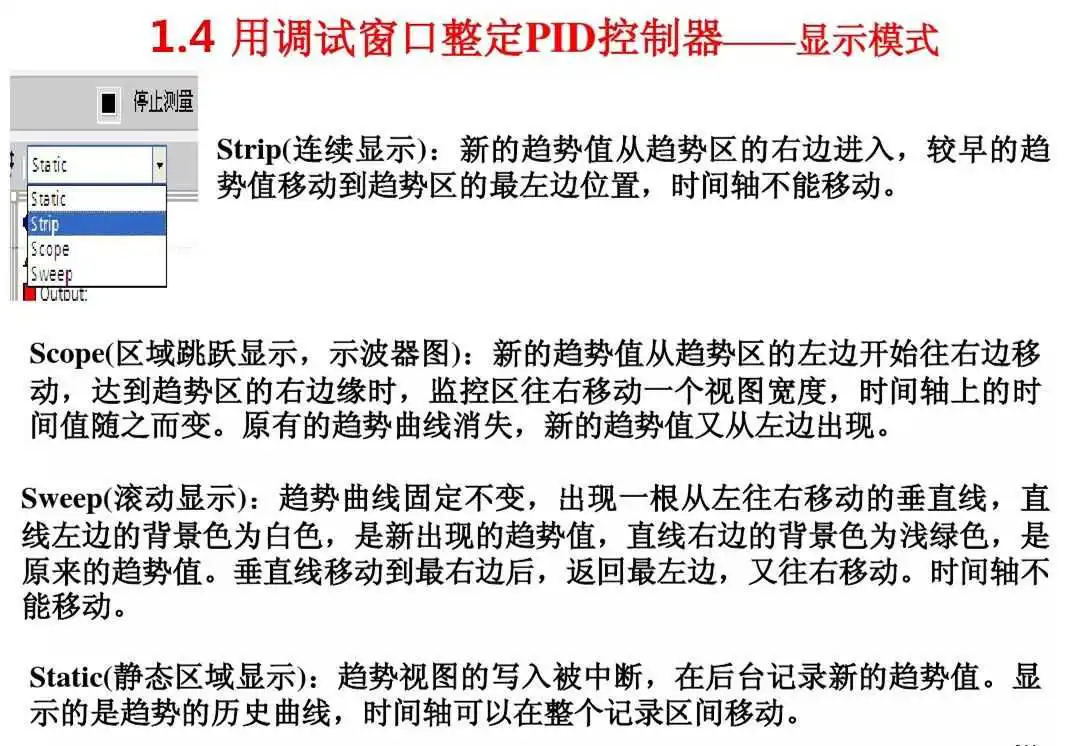
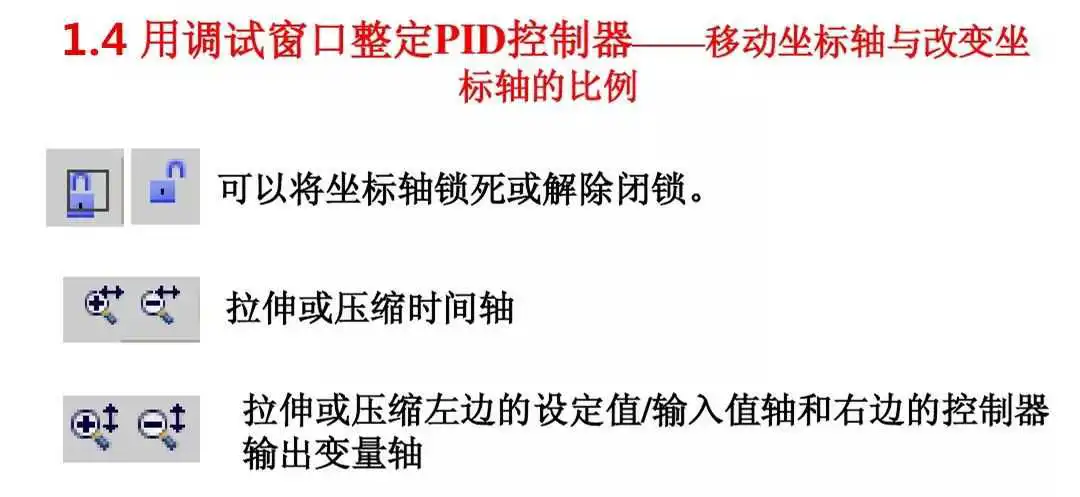
3、用于趋势视图监视当前的闭环控制
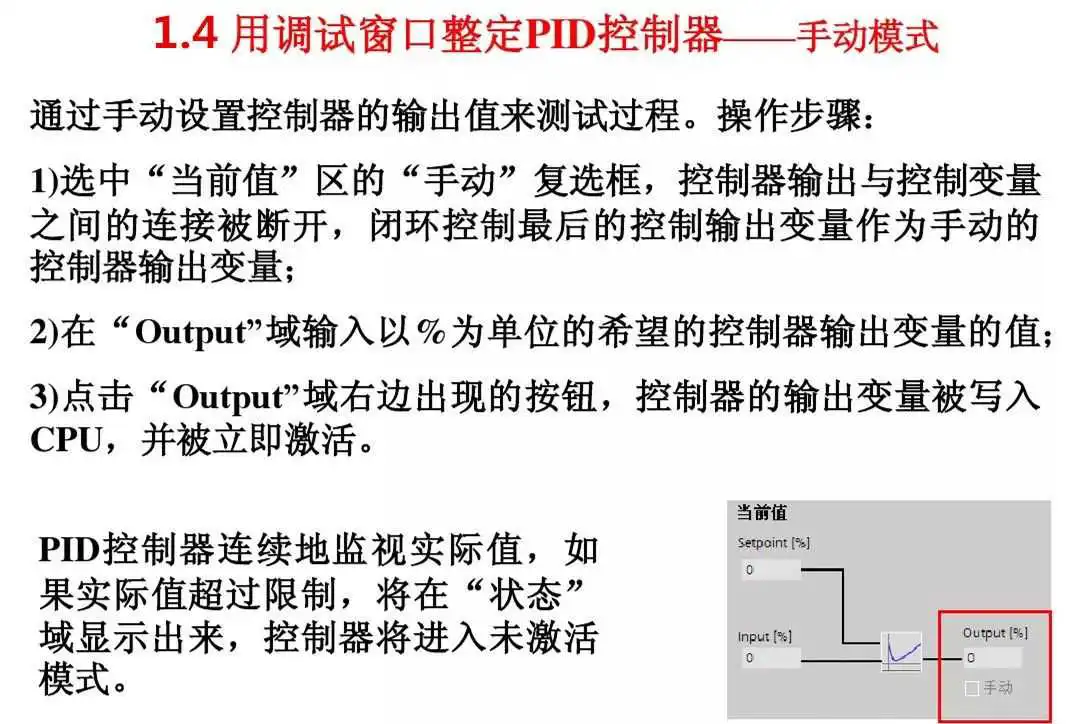
4、通过手动设置控制器的输出值来测试过程
版权声明:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若内容造成侵权、违法违规、事实不符,请将相关资料发送至xkadmin@xkablog.com进行投诉反馈,一经查实,立即处理!
转载请注明出处,原文链接:https://www.xkablog.com/cjjbc/45290.html