
中科视语,卓越技术实力再获国际权威认可!
不久前,2024计算机视觉领域的*学术会议ECCV在全球目光注视中顺利落幕,ECCV的全称是European Conference on Computer Vision(欧洲计算机视觉国际会议),是两年一度的全球计算机视觉领域与模式识别领域*顶尖的学术会议。其与CVPR(IEEE/CVF Computer Vision and Pattern Recognition Conference)、ICCV(IEEE/CVF International Conference on Computer Vision)一起并称为计算机视觉领域的三大*高级别的*会议。本次会议上,备受关注的开放世界鲁棒语义分割挑战赛BRAVO 2024 (a unified Benchmark for Robustness in Autonomous Vehicles in the Open-world,简称BRAVO)也在同期结束了“巅峰对决”,在本次比赛中,中科视语AI团队以62.6的出色成绩,从全球17个国家和地区,百余支顶尖AI团队中脱颖而出,摘下桂冠。这也是中科视语在2024年登顶工业异常检测挑战赛桂冠后,面向图像语义分割技术的又一次实力展示。
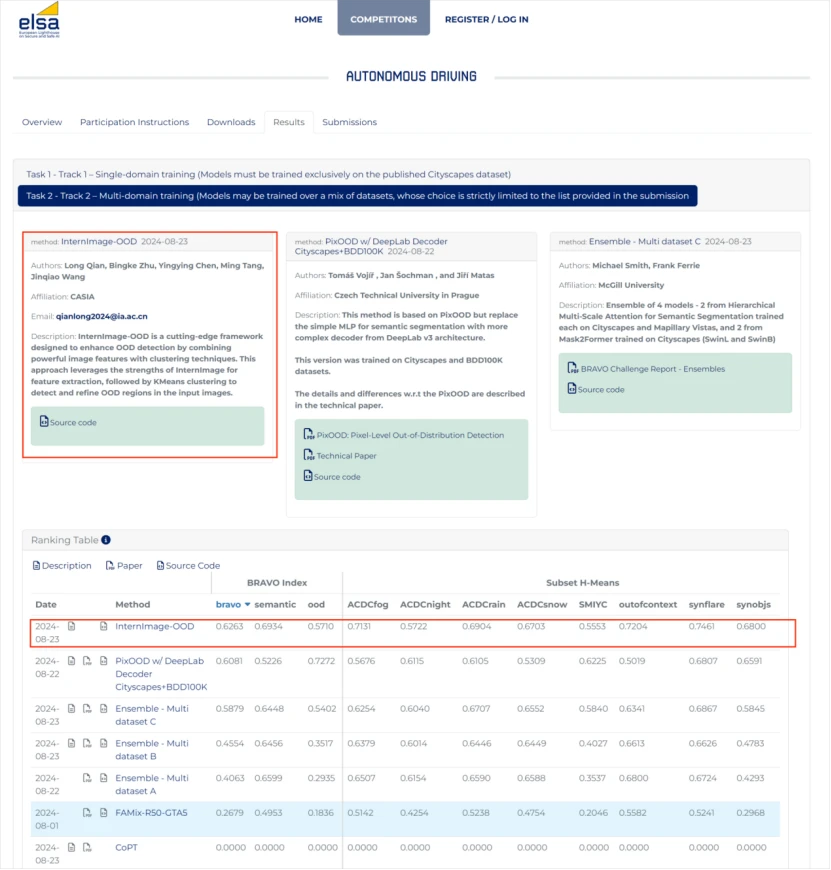
中科视语AI团队斩获 多域图像语义分割 赛道(BRAVO 2024)赛道*名
开放世界鲁棒语义分割挑战赛BRAVO
自动驾驶汽车需要在极其复杂的开放世界中运行,保障乘客安全极其重要。因此,自动驾驶系统不仅需要在其已知域中表现出色,而且必须对对抗性攻击、极端天气条件、未知域环境、或罕见但可能具有灾难性的驾驶情况,具有非常高的鲁棒性。BRAVO比赛旨在开发、测试以及评估自动驾驶感知模型的鲁棒性,以应对以下以安全自动驾驶为目标的挑战:a)模型输出的校准及其不确定性的估计;b)检测域外目标或者区域;c)评估逐渐偏离预期已知域的域偏移程度。
BRAVO比赛旨在对城市场景中各种形式的自然条件和逼真的损坏模拟,对图像语义分割模型进行基准测试。本次BRAVO比赛分为两个赛道:
1.单域训练:仅在 Cityscapes 数据集上训练模型,评估模型在有限监督和地理多样性下,面对现实场景中意外损坏时的鲁棒性。
2.多域训练:在多个混合数据集上训练模型,包括自然域和合成域,评估分割模型在多域数据集条件下对未知域的鲁棒性。
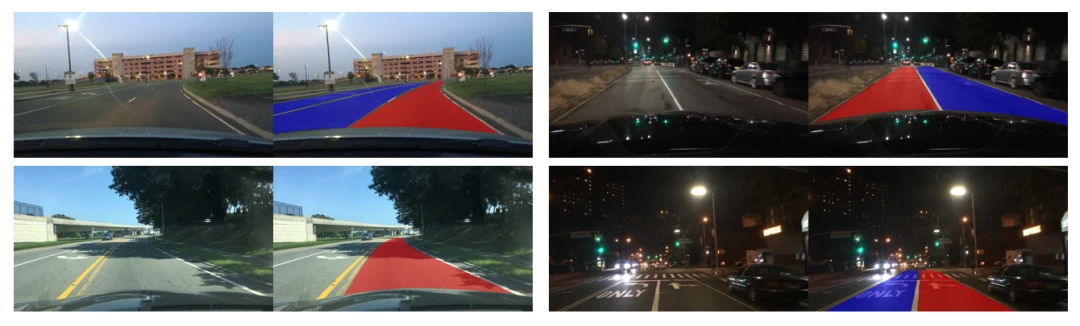
BRAVO比赛需要模型在测试阶段,能够(1)对训练时“特定的环境”下对“已知类别”进行语义分割;(2)对训练阶段“未知的环境”下对“已知类别”进行语义分割;(3)对训练时“特定的环境”下对“异常类别”进行语义分割;(4)对训练阶段“未知的环境”下对“异常类别”进行语义分割。BRAVO比赛要求模型具有极高的鲁棒性和泛化能力。
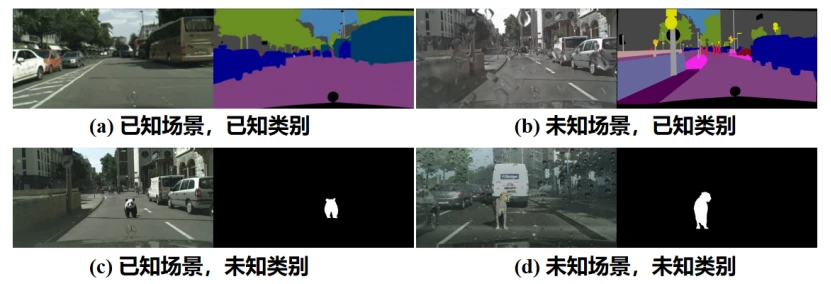
BRAVO四种测试数据类型示意图
基于不确定度度量学习的图像语义分割方法UBANet
为了有效识别出异常类别,同时能够提高模型的泛化能力,研究团队提出了基于不确定度度量学习的图像语义分割方法UBANet,通过对模型预测的不确定度进行建模和函数近似,从而优化模型预测的不确定度,提高模型对于已知类别和未知类别的区分度,进一步增强模型的泛化能力。
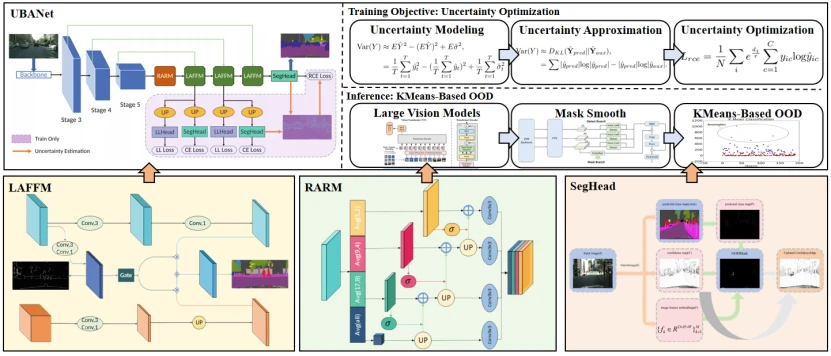
UBANet 结构图
先验引导结构设计的FastSAM 细粒度分割方法
为了进一步优化语义分割的边缘准确性,研究团队采用FastSAM来对模型的预测结果进行边缘平滑。FastSAM包括两个阶段,即全实例分割和提示引导选择阶段。前一个阶段是基础阶段,第二个阶段本质上是面向任务的后处理。整体方法引入了与视觉分割任务相匹配的先验知识,可以在较少的参数数量下更快地收敛。
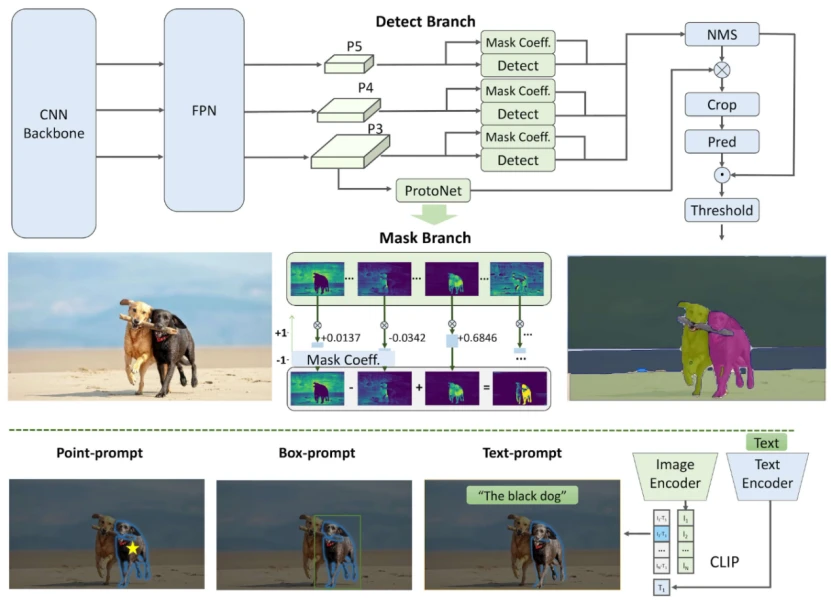
FastSAM 结构图
图像语义分割有效助力智慧交通和智慧工业实现应用落地
中科视语AI团队通过在图像语义分割领域多年的深耕,积累了丰富的研究经验与众多应用落地案例。
在智慧交通领域,中科视语展现出强大的实力,高效地完成了从先进技术到商业化落地的转化。智慧交通拳头产品借助图像语义分割技术,对交通场景实施实时监控,精准识别车辆、行人、交通标志等,为交通管理部门提供可靠决策依据。同时,该技术还具备交通流量统计、事故预警等强大功能,为智慧交通的蓬勃发展提供坚实技术支撑。
在道路瑕疵检测方面,图像语义分割再度彰显关键作用。通过中科视语先进算法,实现对道路图像进行精细分析,自动识别裂缝、坑洼等各类瑕疵,准确区分道路不同部分并定位瑕疵位置。这一技术大幅提升检测效率,降低人工巡检成本与时间,实现实时监测,及时发现道路问题,为道路维护提供精准信息,有力推动交通基础设施不断完善。
除此之外,图像语义分割在无人驾驶领域发挥着至关重要的作用。它能够对车辆周围的环境进行精确分析,区分道路、车辆、行人、交通标志等不同元素。通过图像语义分割技术,无人驾驶汽车可以准确识别行驶路径,及时避开障碍物,极大地提高行驶的安全性。同时,该技术还能帮助车辆更好地理解交通场景,辅助决策。图像语义分割为无人驾驶的实现提供了强大的技术支持,推动着无人驾驶技术不断向前发展。
在工业领域,图像语义分割同样价值巨大。在工业安全生产方面,实现对工厂环境实时监测分析,准确识别设备运行状态、人员操作行为及潜在安全隐患区域,及时发出预警,有效降低安全事故发生概率。在工业质检环节,更是大显身手,精确区分产品不同部位,快速检测出表面瑕疵、尺寸偏差等问题,提高质检效率与准确性,减少人为误差,确保产品质量一致性与可靠性,为工业领域的安全生产与高质量发展提供强大支撑。
到此这篇tpami和cvpr哪个更厉害(cvpr和iccv哪个好)的文章就介绍到这了,更多相关内容请继续浏览下面的相关推荐文章,希望大家都能在编程的领域有一番成就!版权声明:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若内容造成侵权、违法违规、事实不符,请将相关资料发送至xkadmin@xkablog.com进行投诉反馈,一经查实,立即处理!
转载请注明出处,原文链接:https://www.xkablog.com/rfx/24600.html